

この記事では、ステッピングモータを制御するために欠かせない概念である電流減衰方式について簡潔に、分かりやすく解説します。
※この記事ではステッピングモータおよびHブリッジ回路に関する最低限の知識を前提としています。
Hブリッジ回路については下記の記事で詳しく説明しています!

“減衰”は英語で“Decay”ですが、電流減衰方式には主に“Slow Decay”と“Fast Decay”があります。
✔️電流減衰方式とは?ステッピングモータ制御に必要な理由
✔️Slow Decay方式とFast Decay方式とはなにか
✔️Slow Decay方式とFast Decay方式の使い分け
使い分けに関して結論を先に書くと、基本はSlow Decayとし、電流波形を評価した後、歪んでいる(制御に追従できていない)ようでればFast Decayを採用する、ということとなります。
この理由について以下、詳しく簡潔に説明します。
ステッピングモータの定電流制御
ステッピングモータは、ステップごとに一定の電流を流す必要があります。
“一定の電流”は、得たいトルクに応じて任意に設定します。これを定電流制御といいます。
定電流制御は、Hブリッジ回路をPWM(パルス幅変調)制御することで実現します。

Decay(電流減衰)とは
定電流制御(PWM制御)は、モータのON/OFFを高速で繰り返すため、モータの電流波形は狭い時間軸において三角波のようになります(下図)が、モータ駆動回路のレスポンスに対して十分に長い時間軸で実行値をとり定電流とみなします。
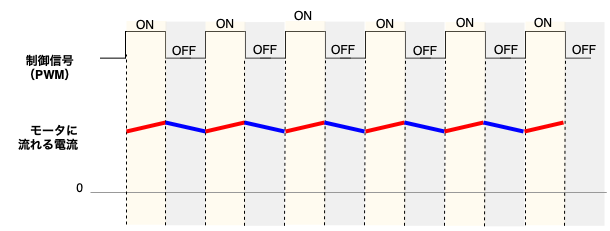
右肩上がりの傾き(赤線)区間は、電源からインダクタに電流が流れます。この間は、インダクタにはエネルギーが蓄積されていく状態です。
続いて、右肩下がりの傾き(青線)区間は、電源からインダクタへの給電が遮断されます。この間は、インダクタに蓄積されたエネルギーを放出することによって電流を流し続ける状態、つまり、エネルギーが減衰してく状態です。
インダクタに蓄積されたエネルギーを減衰させる方法には2種類あります。
ゆっくり減衰させる(傾きは緩やかになる)”Slow Decay”と、素早く減衰させる(傾きは急峻になる)Fast Decayです。
これらの電流減衰方式には、それぞれ長所と短所があります。
電流減衰の動作原理
インダクタへの給電と減衰方式の動作原理について、図を用いて説明します。
インダクタへの給電
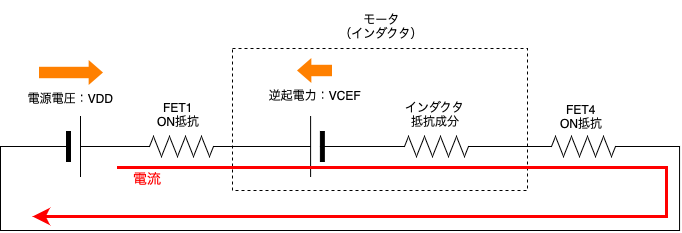
Hブリッジ回路がONすると、電源VDDからモータ(インダクタ)に電流が流れます(上述した電流波形が右肩上がりになっている区間)。
これはインダクタにエネルギーを給電している状態です。

このとき、モータは回転していますから、インダクタには電源とは逆向きに逆起電力VCEFが発生しています。電源はモータの逆起電力に逆らって電流を流します。
下図に等価回路を示します。
“Slow Decay”
電源VDDからインダクタへエネルギーが給電されている状態でHブリッジ回路を“ブレーキ”状態にする(FET1をOFF、FET3をONする)と、モータは電源VDDから切り離され、モータ端子間が短絡した状態となります。
Hブリッジ回路を”ブレーキ”状態にすることでインダクタのエネルギーを減衰させる方式を”Slow Decay”といいます。
インダクタは電源から切り離されても、蓄積されたエネルギーを使用することで、それまで流れていた電流を流し続けようとします。
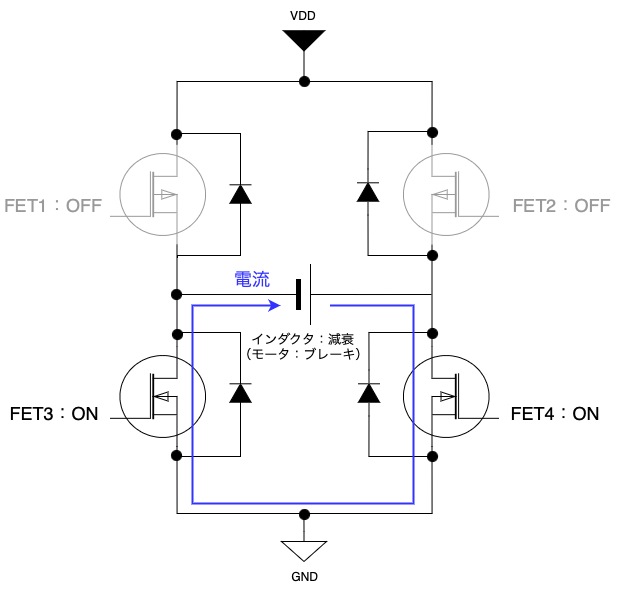
この特性によって、インダクタは定電流源のように振舞います(以下、このインダクタ電源をVLと表記します)が、電流は減衰していき、やがてエネルギーが尽きます。
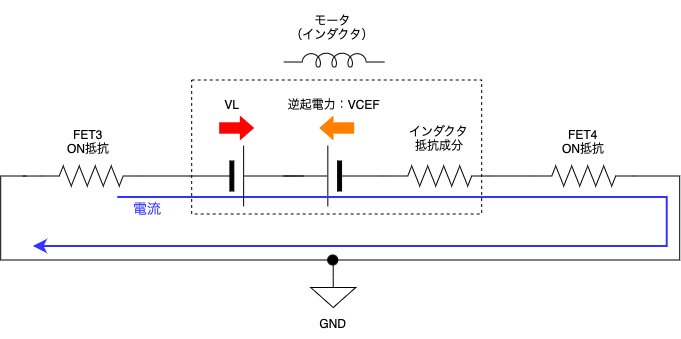
このときの等価回路を下図に示します。このときもモータは回転していますから、逆起電力VCEFが発生しています。
※VLとVCEFは混同しやすいですが別物ですので注意
イメージしやすいよう、具体的に計算してみます。
Hブリッジ回路ON時にモータに流れていた電流を1Aとし、モータの逆起電力VCEFを12V、モータの抵抗成分を0.05Ω、FETのON抵抗を0.1Ωとすると、
VL = 12V + 0.05Ω x 1A + 0.1Ω x 1A + 0.1Ω x 1A = 12.25V
となります。

このVLの値は、後述する”Fast Decay”と比較すると非常に小さいものとなるため、インダクタのエネルギーを減衰させるために時間がかかります。
“Fast Decay”
電源VDDからインダクタへエネルギーが給電されている状態からHブリッジ回路を“逆転”状態にし(FET1、FET3をOFF、FET2、4をONする)、インダクタにそれまでとは逆向きにVDDを印加します。
Hブリッジ回路を”逆転”状態にすることでインダクタのエネルギーを減衰させる方式を”Fast Decay”といいます。
Slow Decayの説明にも記載したように、インダクタは蓄積されたエネルギーを使用することで、それまで流れていた電流を流し続けようとします。
ただし、これまでの電流経路(FET4)は閉じていますので、FET2を通ってVDD側へ電流が流れます(回生といいます)。
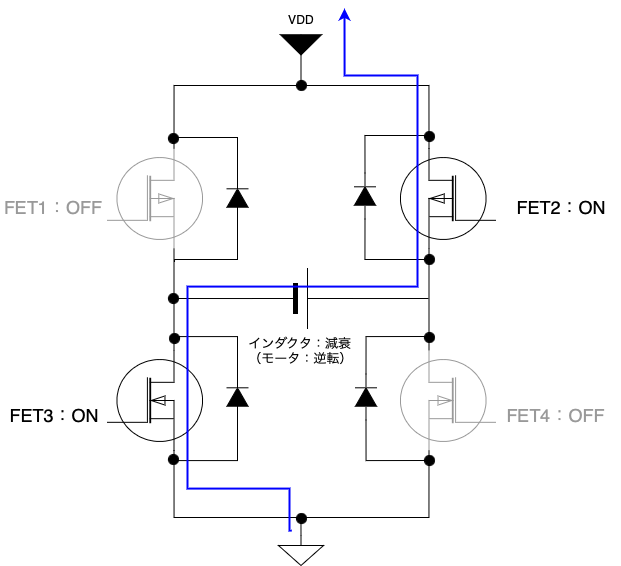
インダクタはVDDに逆らいながらそれまで流れていた電流を流し続けようとしますが、減衰していき、やがてエネルギーが尽きます。
このときの等価回路を下図に示します。このときもモータは回転していますから、逆起電力VCEFが発生しています。
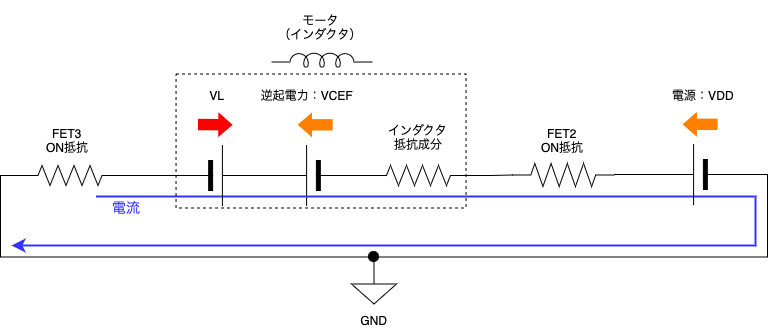
Slow Decayと異なり、電源電圧VDDに逆らって電流を流していることがポイントです。これにより、VLはSlow Decayのときよりも大きな電圧となります。
イメージしやすいよう、具体的に計算してみます。
Hブリッジ回路ON時にモータに流れていた電流を1Aとし、モータの逆起電力VCEFを12V、電源電圧VDDを35V、モータの抵抗成分を0.05Ω、FETのON抵抗を0.1Ωとすると、
VL = 12V + 0.05Ω x 1A + 0.1Ω x 1A + 0.1Ω x 1A + 35V = 47.25V
となります。
この関係を下図に示します。

このVLの値は、前述した”Slow Decay”と比較すると非常に大きいものとなるため、より短時間でインダクタのエネルギーを減衰させることができます。
電流減衰方式の使い分け
以下、各方式の使い分けについて説明します。
各方式では、にはそれぞれメリット・デメリットがあります。
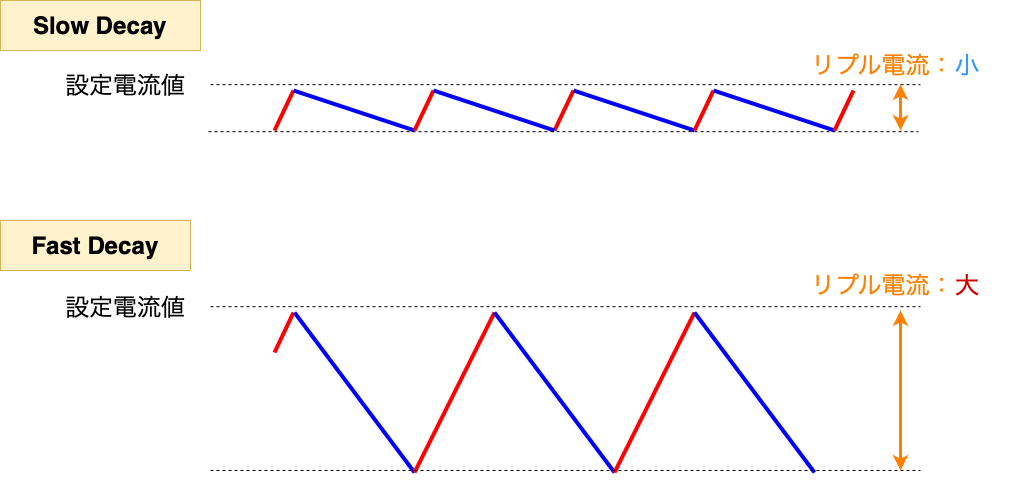
リプル電流
減衰速度の速いFast Decayよりも減衰速度の遅いSlow Decayの方が、電流リプルが少なくなります。減衰速度が速いほど設定電流に対する電流の落ち込みと上昇の幅が大きくなるためです。
これにより、Slow Decayには次の利点があると言えます。
◯低ノイズ
リプルが少ないため放射ノイズを発生させにくい
◯同トルクで低電流
設定電流が同じでも減衰幅が少ない方が実行値としては大きな電流となります。
よって、同じトルクでも、より少ない電流で済むことになります。
制御応答性
Slow Decayは電流の減衰速度が遅いため、ステップ変化(制御による設定電流値の変更)に対する電流波形の応答性が悪くなることがあります。
また、インダクタのエネルギーを十分に減衰しきっていないのに次の給電ターンが来てしまうことで、インダクタのエネルギーが意図せず増え続けてしまう、といったことも波形歪みの原因となります。
制御するステップ数が多くなる(高周波になる)と、Slow DecayとFast Decayの電流波形の差は顕著になります。

設計者は波形の確認を行い、きれいなステップ波形となっているかを確認し、必要があればFast Decayを選択する必要があります。
まとめ
冒頭にも記載しましたが、基本はリプルの少ないSlow Decayの方が良く、電流波形を評価した後、歪んでいる(制御に追従できていない)ようでればFast Decayを採用する、ということとなります。
| 減衰方式 | 減衰速度 | 動作原理 | リプル電流 | 制御応答性 (ステップ波形) |
|---|---|---|---|---|
| Slow Decay | 速い | ブレーキ | ⭕️少ない ・低ノイズ ・同トルク低電流 | ⭕️悪い (歪む) |
| Fast Decay | 遅い | 逆転 | ❌大きい ・高ノイズ ・同トルク大電流 | ❌良い (きれい) |


コメント
とても分かりやすく参考になりました。
モータードライバが PWM 入力に対して、
ON/OFF でなく ON/ショートブレーキ になってる理由を
調べていてここに辿り着きました。
たすかりました。
余計かもですが、一点だけ
Fast Decay の回路図中の ON/OFF 表示ですが、
FET2 の表示が ON の誤りのようです。
コメントありがとうございます。
お役に立ててよかったです。
また、誤記のご指摘ありがとうございます。近々修正しておきます。