

モータを「正転」・「逆転」・「ブレーキ」・「停止」の状態に切替る回路をHブリッジ回路と言います。
本記事ではHブリッジ回路の動作原理と設計方法について詳しく、分かりやすく説明します。
機能的な動作原理のみでなく、以外と知られていない電気的な動作原理(電流の流れ方や、逆起電力とインダクタエネルギーの関係)まで解説します。
本記事を読むことで、5分程度でHブリッジ回路をマスターすることができます。
✔️Hブリッジ回路とはなにか
✔️正転、逆転、ブレーキ、停止、の各状態における電流の流れ
✔️電源電圧、逆起電力、フライバック電圧の関係
✔️上記に伴うモータの動き
Hブリッジ回路とは
Hブリッジ回路とは、4つのスイッチを制御することで、モータを「正転」、「逆転」、「ブレーキ」、「停止(オフ)」状態に切替えることができる回路です。
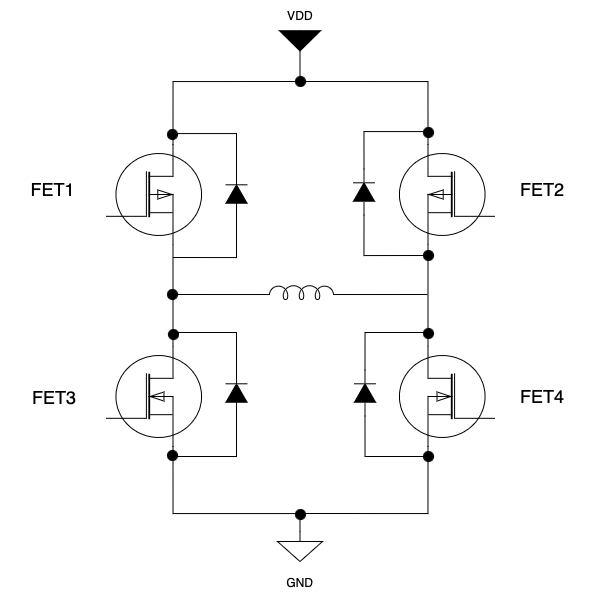
下図のように、4つのスイッチの中央にモータを接続した形状が「H」の字に見えることからHブリッジ回路と呼ばれます。
「逆転」 ・・・ モータを正転と逆方向に回転させる
「ブレーキ」 ・・・ モータを素早く停止させる、物理的な負荷が加わっても回転しにくい
「停止」 ・・・ モータを停止させる、物理的な負荷が加わると回転しやすい
以下、これらの動作原理について詳しく説明していきます。
Hブリッジ回路の動作原理
Hブリッジ回路は4つのスイッチでモータを制御する回路です。
スイッチはMOS FETを使用します。
正転(モータを回転させる)
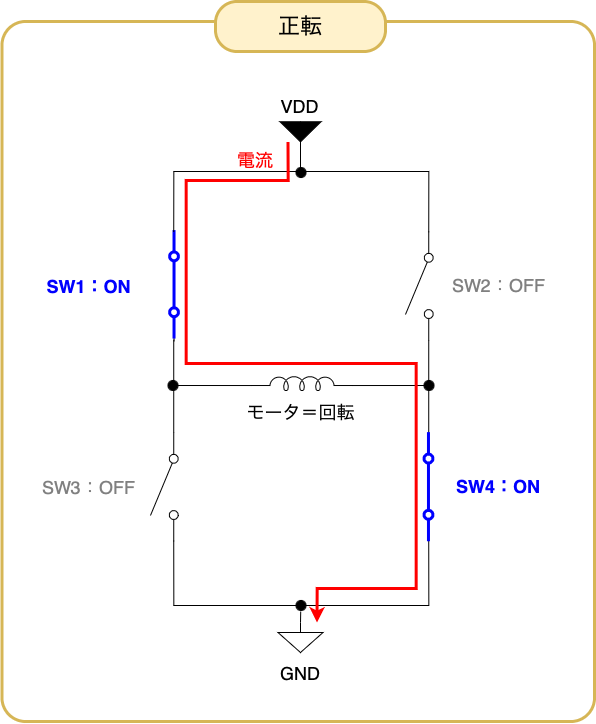
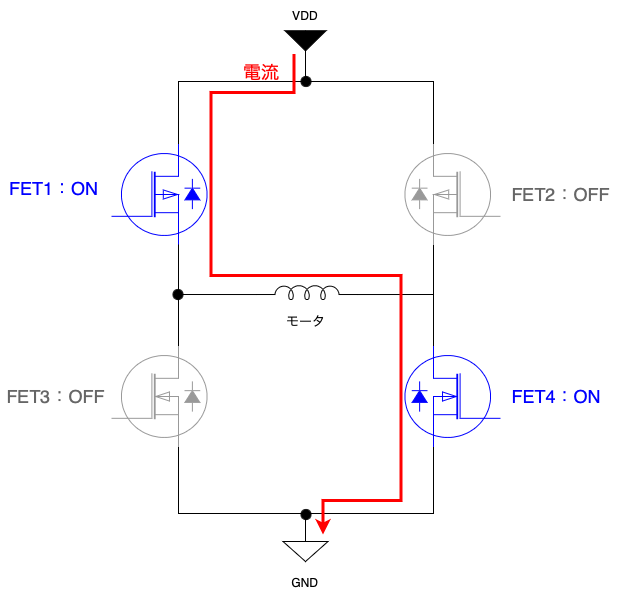
下図に「正転」時のHブリッジ回路の状態を示します。
FET1とFET4をオンすると赤矢印の経路で電流が流れモータが回転します。本記事内では、下図の方向に電流が流れたときにモータが回転する方向を「正転」方向とします。
停止しているモータが加速していき、定速回転に至るまでにモータに流れる電流の様子を下図に示します。
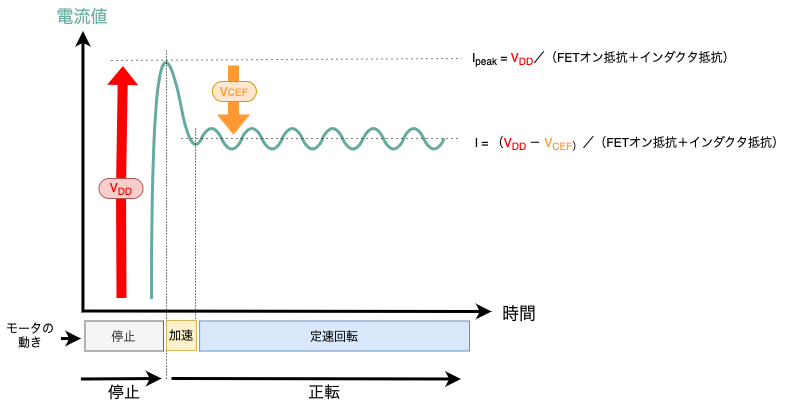
電流が流れ始めてからモータが回転し始めるまで(上図”停止”の区間)に流れる電流IPEAKは、オームの法則により、下記となります。
IPEAK = VDD/(RON_FET1 + RON_FET4 + RL)
FETのオン抵抗:RON_FET* や、インダクタの直列抵抗成分:RLの抵抗値は非常に小さく、Ipeakは大きな値となります。これを“突入電流”、“起動電流”、“停動電流”といいます。
次に、モータが回転し始める(加速していく)と、フレミングの右手の法則(磁場で導体を動かすと起電力が発生して電流が流れる)により、電源電圧VDDとは逆向きに逆起電力VCEFが発生し、モータの回転数に比例して大きくなっていきます。
回転数がある程度まで上がると、電源電圧VDDと逆起電力VCEFは拮抗し、安定(定速回転)します。
このときの等価回路を下図に示します。
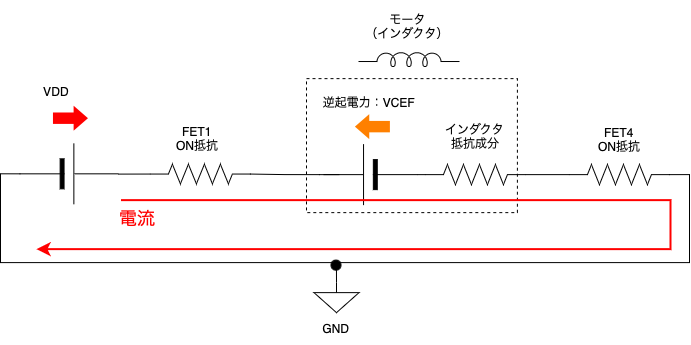
電源電圧VDDは、逆起電力VCEFに逆らいながらモータに電流を流し続けます。
このとき流れる電流Iは、下記となります。
I= (VDD ー VCEF)/(RON_FET1 + RON_FET4 + RL)
逆転(モータを正転方向と逆向きに回転させる)
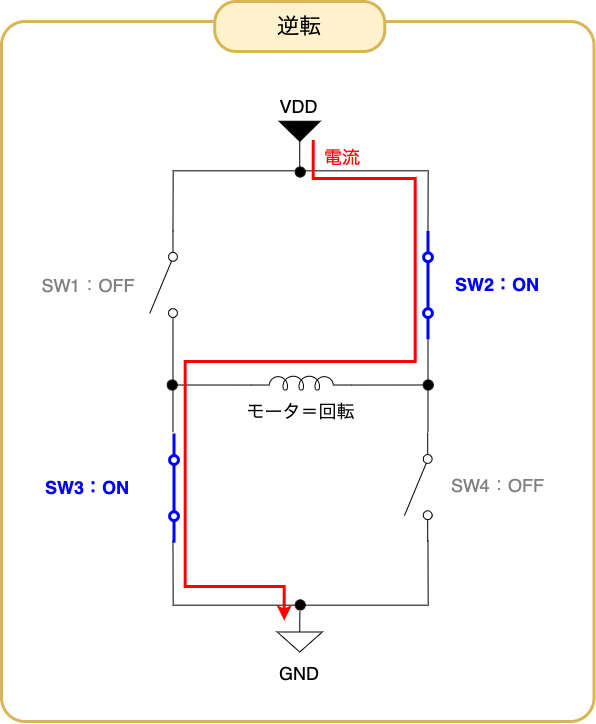
下図に「逆転」時のHブリッジ回路の状態を示します。
FET2とFET3をオンすると赤矢印の経路で電流が流れモータが回転します。モータには、「正転」時と逆方向に電流が流れるため、逆回転します。
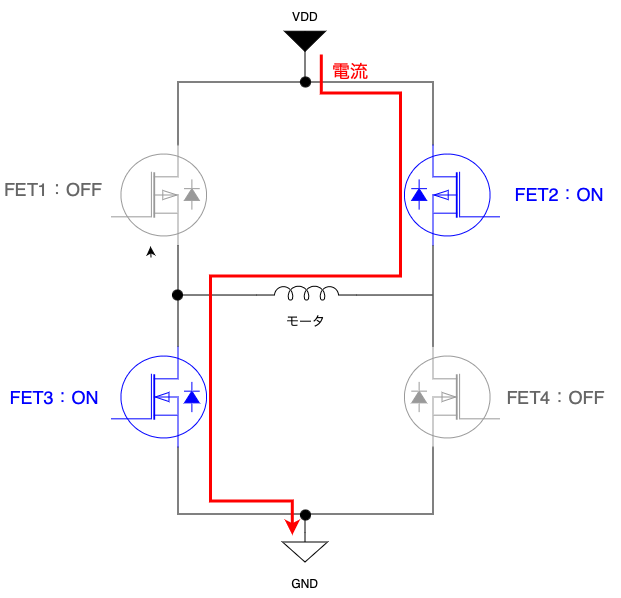
「逆転」状態では、VDDが印加される方向と逆起電力VCEFの向きが反対になる(電流の向きが逆になる)だけで、動作原理としては「正転」時と同じになります。
ブレーキ(回転しているモータを急停止させる)
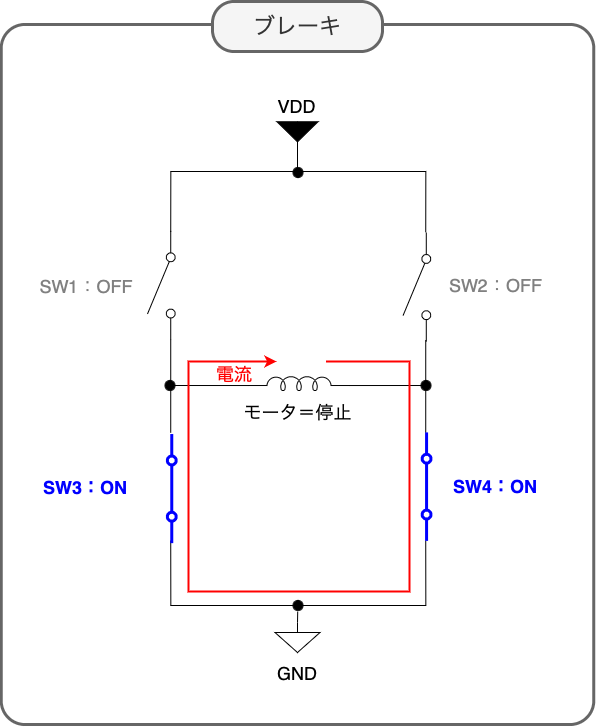
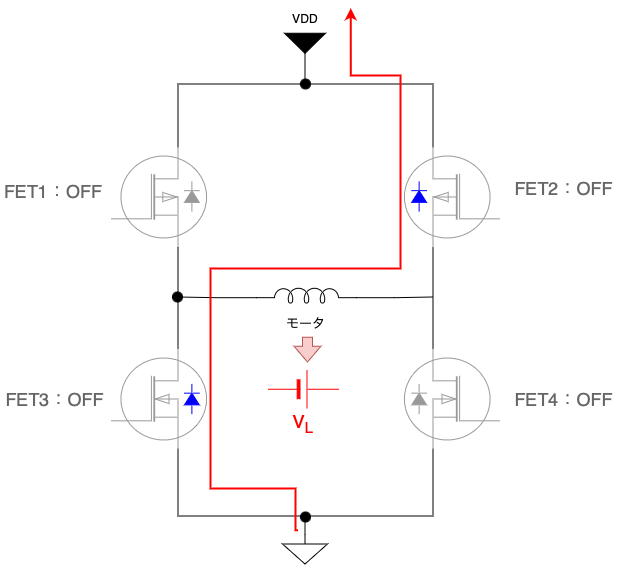
下図に「正転」状態から「ブレーキ」状態にしたときのHブリッジ回路の状態を示します。
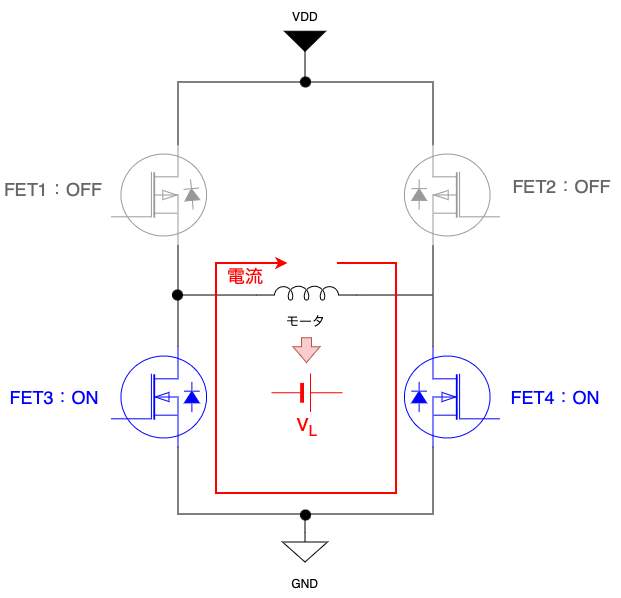
「正転」状態で、モータを電源VDDから切り離し端子間を短絡させる(FET1をオフ、FET3をオン)ことでモータに「ブレーキ」がかかります。
「ブレーキ」状態では、回転していたモータは急停止します。
モータの構成要素であるインダクタには、自身に流れる電流の変化を嫌う性質があり、電源VDDから切り離された後も、それまで流れていた電流を流し続けようとします(電圧源VLとして振る舞います)。
FET3とFET4をオンしていますので、電源VLによって上図の経路で電流が流れます。
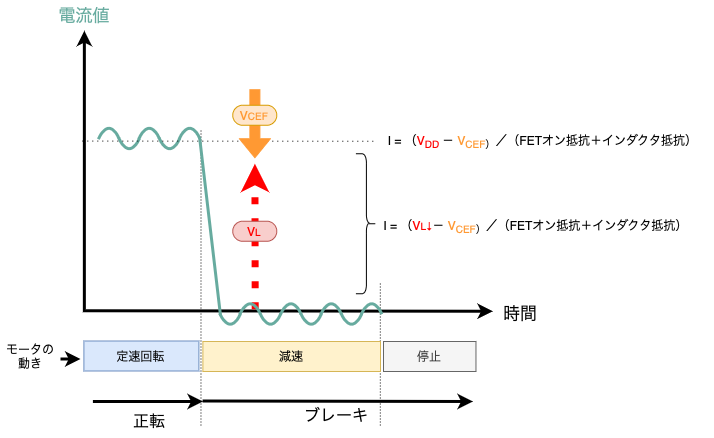
回転していたモータにブレーキがかかり減速し、停止に至るまでのモータに流れる電流波形を下図に示します。
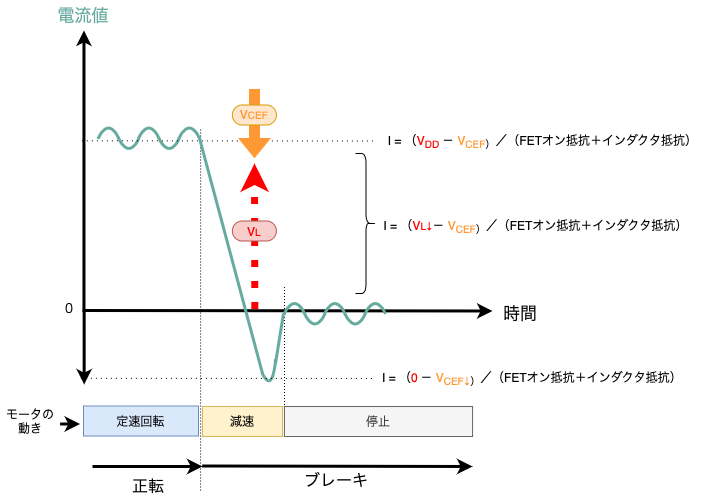
上記「正転」の説明に記載したとおり、モータが定速回転しているとき、モータに流れる電流は下記となります。
I= (VDD ー VCEF)/(RON_FET1 + RON_FET4 + RL)
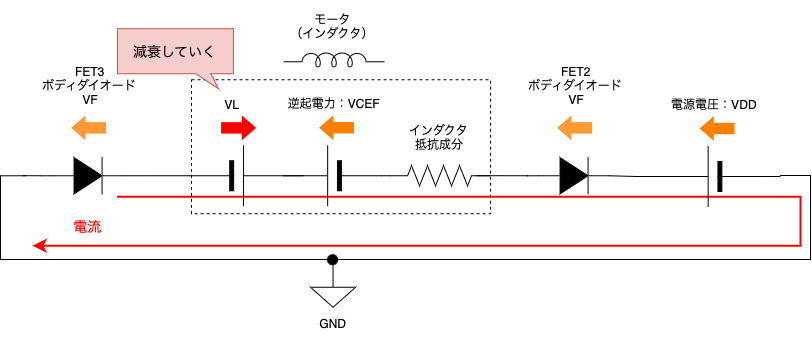
ここで、モータを「ブレーキ」状態にして電源VDDから切り離すと、インダクタは電源VLとなり、VDDに代わって逆起電力VCEFに逆らいながら電流を流し続けますが、そのエネルギーは減衰していきます。
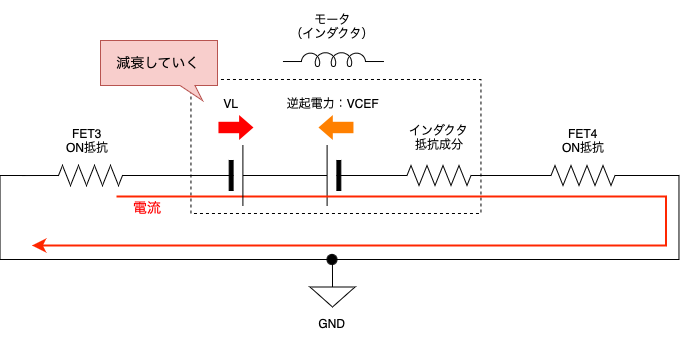
I= (VL↓ー VCEF)/(RON_FET1 + RON_FET4 + RL)・・・VLは徐々に減少していく
やがてVLがVCEFよりも小さくなる(VLはやがてゼロになる)と、電流が逆向きに流れます。
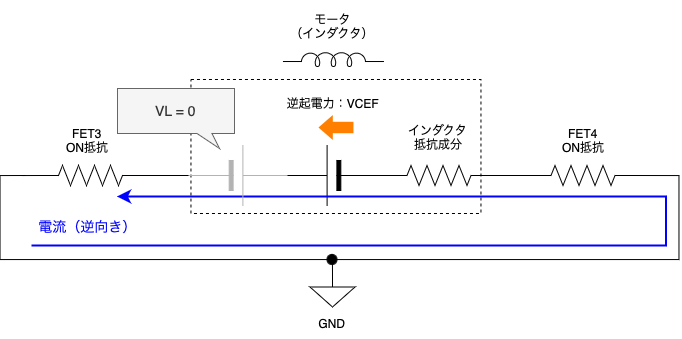
I= (0 ー VCEF)/(RON_FET1 + RON_FET4 + RL)・・・電流はマイナスになる
モータに逆向きの電流が流れることで、回転方向とは逆向きのトルクが働くため、モータの回転力は急速に低下します(モータにブレーキがかかります)。
モータが減速していきやがて停止すると、逆起電力はゼロとなりますので、逆向きの電流もゼロとなります。
以上が「ブレーキ」の動作原理となります。
停止(モータを電気的に切り離す)
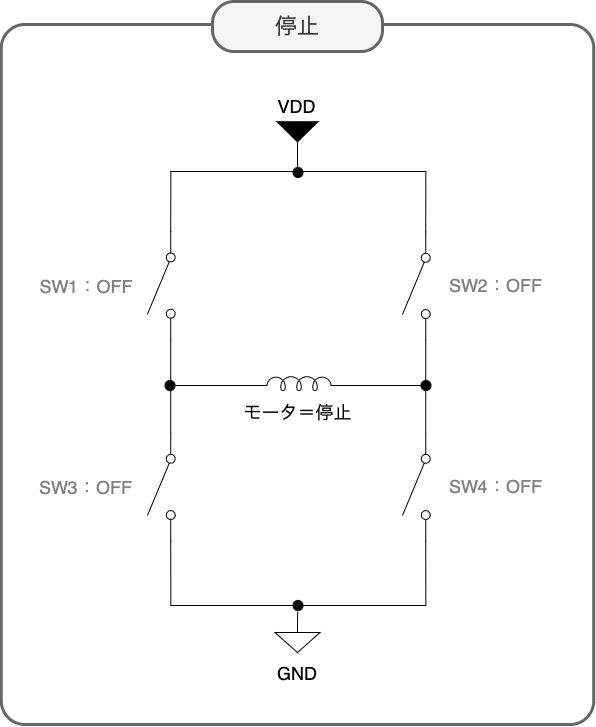
下図に「正転」状態から「停止」状態にしたときのHブリッジ回路の状態を示します。
全てのFETをオフし、モータをHブリッジ回路から切り離すことを「停止」または「オフ」状態といいます。
回転中のモータを「停止」状態にすると、モータはゆっくりと停止します。
「ブレーキ」状態と同様、
モータの構成要素であるインダクタには、自身に流れる電流の変化を嫌う性質があり、電源VDDから切り離された後も、それまで流れていた電流を流し続けようとします(電源VLとして振る舞います)。
「ブレーキ」状態とは異なり、全てのFETはオフしていますが、VLによってFETのボディダイオード(寄生ダイオード)がオンすることで、上図の経路で電流が流れます。
回転していたモータが「停止」状態となり減速し、停止に至るまでのモータに流れる電流波形を下図に示します。
上記「正転」の説明に記載したとおり、モータが定速回転しているとき、モータに流れる電流は、下記となります。
I=(VDDーVCEF)/(RON_FET1+RON_FET4+RL)
ここで、モータを「停止」状態にしてHブリッジ回路から切り離すと、インダクタは電源VLとなり、逆起電力VCEFと電源電圧VDDに逆らって電流を流し続けますが、そのエネルギーは減衰していき(流れる電流は減っていき)ます。
I=(VL↓ーVCEFーVF_FET2ーVDDーVF_FET3)/RL・・・VLは徐々に減少していく
VLが低下すると、やがてFETのボディダイオードをオンできなくなります。
モータは回転しているため逆起電力VCEFは発生していますが、「ブレーキ」状態とは異なり、電流が流れる経路は存在しないため、マイナス方向への電流は流れません(下図)。
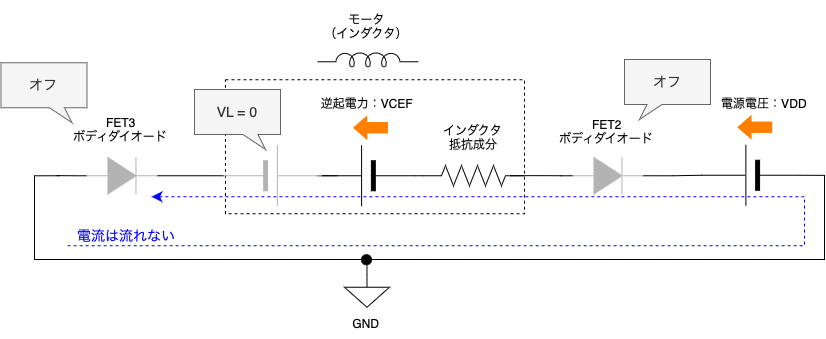
よって、モータは機械的な負荷によって自然に停止するまで回転を続けます。回転方向と逆向きにトルクがかかる「ブレーキ」と比較するとモータが停止するまでの時間は長くなります。
以上が、「停止」の動作原理となります。
「ブレーキ」と「停止」の違い
「ブレーキ」と「停止」は共にモータを停止させるための動作なので混同しがちですが、下記において明確な違いがあります。
✔️物理的な外力(負荷)に対する抵抗力
モータ停止までの時間
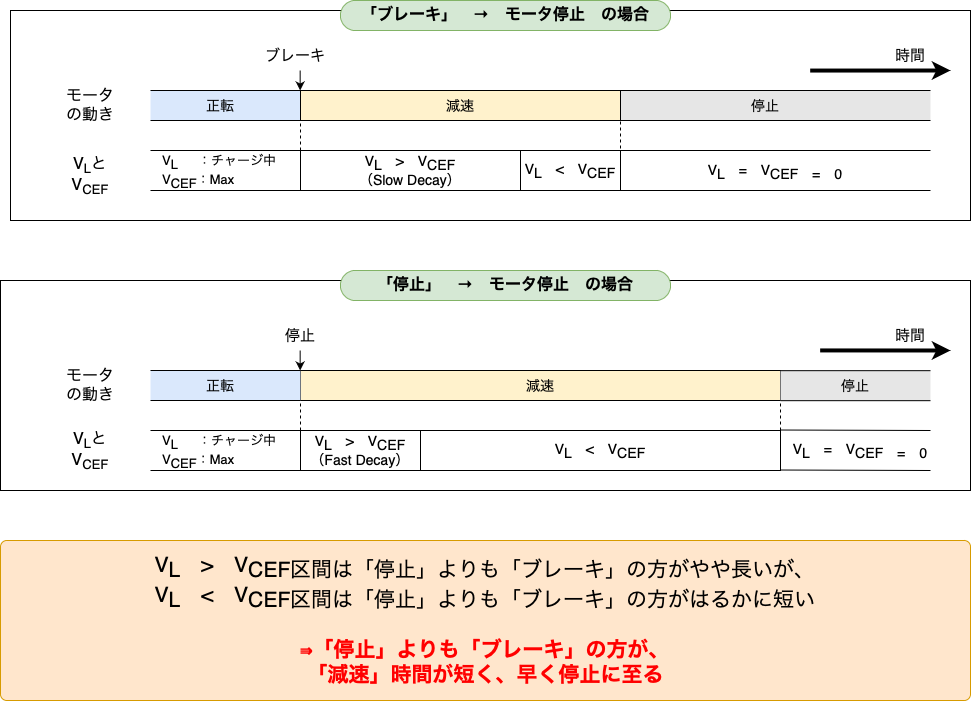
「ブレーキ」状態、「停止」状態、どちらの場合も、回転状態から遷移した直後は、インダクタのエネルギーVLが発生してモータに電流を流し続けます。
インダクタのエネルギーは徐々に減衰していきますが、減衰スピードは電源VDDに逆らって電流を流す「停止」状態の方が、そうでない「ブレーキ」状態よりも、速くなります。
余談ですが、
電源VDDに逆らうことで、インダクタのエネルギーを素早く減衰させる方式を”Fast Decay”といいます。
逆に、「ブレーキ」状態のように、モータの直列抵抗など微小な抵抗による電圧降下のみでインダクタのエネルギーをゆっくりと減衰させる方式を”Slow Decay”といいます。
“Fast Decay”、”Slow Decay”については、下記の記事で詳細を記載しています。

一方、インダクタのエネルギーVLが逆起電力VCEFよりも小さくなった後は、トルク(電流)が逆向きに作用する「ブレーキ」状態の方が、「停止」状態よりも早くモータ停止に至ります。
「正転」状態から「ブレーキ」状態または「停止」状態に遷移した時点から、実際にモータが停止するまでにトータルでかかる時間は、「ブレーキ」状態の方が「停止」状態よりも格段に早くなります。
物理的な外力(負荷)に対する抵抗力
これまでは、「ブレーキ」状態または「停止」状態について、”モータが回転している状態から遷移するケース”を主に記述しましたが、”モータが停止した後”にも差があります。
停止しているモータに対して、物理的な外力が加わったとき(例えば、手でモータを直接回そうとしたとき)、「ブレーキ」状態の方が、「停止」状態よりも外力に対する抵抗力が大きくなります(モータが回りにくくなります)。
「ブレーキ」状態でモータを回転させると、回転数に比例した逆起電力VCEFが働き、モータの回転方向とは逆向きのトルクが働くためです。
一方、「停止」状態でモータを回転させても、逆起電力VCEFによって逆向きのトルクは発生しません(逆向きの電流が流れる経路が無いため)。
すなわち、モータ停止中に物理的な外力の影響を受けたくないシステムは「ブレーキ」状態を、モータ停止中もモータをフリー回転する状態にしたいシステムは「停止」状態を選択します。
例えば、電動開閉するゴミ箱のフタに使用されているモータの場合、ユーザが手動で開閉する場合も想定するのであれば、開閉時以外は「停止」状態にしてフタを開けやすい状態にしておくことが望ましいです。
一方、UFOキャッチャーのクレーンなどは、停止中に外部の振動などで位置ずれが起きないよう、「ブレーキ」状態にしておくのが良いかもしれません。
※実際に電動ゴミ箱やUFOキャッチャーがこのような制御になっているかは不明です。
まとめ
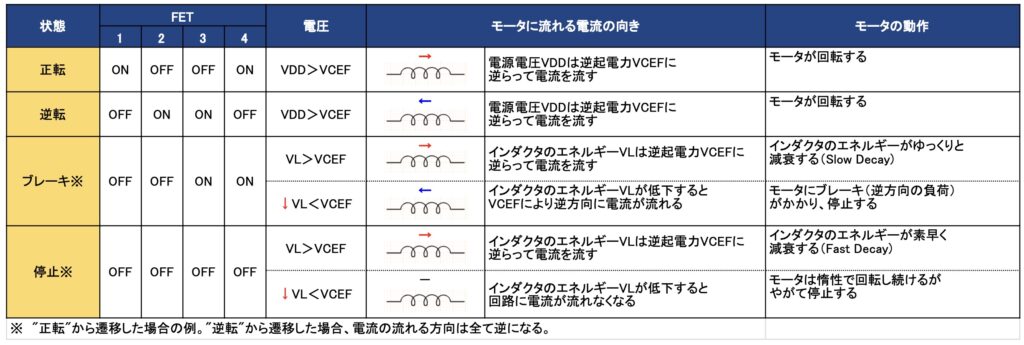
以上、Hブリッジの動作原理をまとめた表を下記に示します。

コメント
コイルの電源VLと逆起電力VCEFが同時に発生しているというのが、目から鱗状態で、非常に勉強になりました。
全体的に非常にわかりやすい説明なので、今後にも期待したく、普段、コメント等はしないのですが、感謝のコメントを送らせて頂きました。
コメントありがとうございます。大変励みになります。あまり頻繁に更新できませんが、今後ともよろしくお願いします。